Human Vision Based 3D Point Cloud Semantic Segmentation of Large-Scale Outdoor Scenes
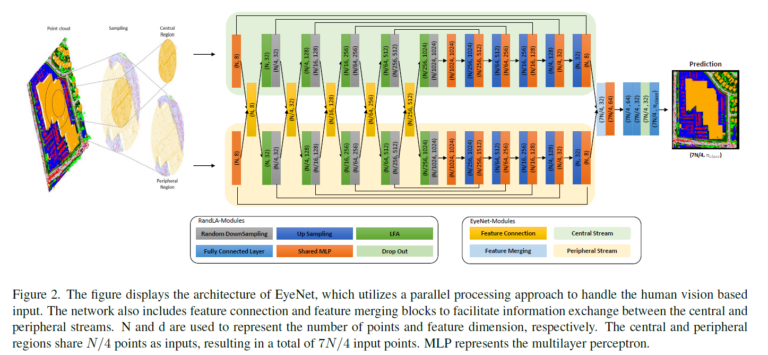
Authors: Sunghwan Yoo, Yeongjeong Jeong, Maryam Jameela, Gunho Sohn Department of Earth and Space Science and Engineering, York University Toronto, ON M3J 1P3 Canada CVPR PCV Workshop 2023 Abstract We proposed EyeNet, a novel semantic segmentation network for point clouds…